The hardware and bandwidth for this mirror is donated by dogado GmbH, the Webhosting and Full Service-Cloud Provider. Check out our Wordpress Tutorial.
If you wish to report a bug, or if you are interested in having us mirror your free-software or open-source project, please feel free to contact us at mirror[@]dogado.de.
![]()
![]()
The massProps package extends rollupTree
with functions to recursively calculate mass properties (and optionally,
their uncertainties) for arbitrary composition trees. Formulas
implemented are described in a technical paper published by the Society
of Allied Weight Engineers (Zimmerman and Nakai 2005).
install.packages("massProps")You can install the development version of massProps from GitHub with:
# install.packages("pak")
pak::pak("jsjuni/massProps")Suppose we have the following mass properties table:
library(massProps)
test_table
#> id parent mass Cx Cy Cz Ixx Ixy Ixz Iyy Iyz Izz POIconv Ipoint
#> 1 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 2 A.2 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 3 A.3 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 4 C.1 A.1 5 0 0 0 80 -4.0 -24.0 80 -24.0 75 - FALSE
#> 5 P.1 A.2 2 1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 6 P.2 A.2 2 1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 7 P.3 A.2 2 1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 8 P.4 A.2 2 1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 9 P.5 A.3 2 -1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 10 P.6 A.3 2 -1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 11 P.7 A.3 2 -1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 12 P.8 A.3 2 -1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSEPOIconv indicates the products of inertia sign
convention. In the negative convention, for example, \(I_{XY} \equiv -\int{xy \rho \, dV}\). In
the positive convention, \(I_{XY} \equiv
\int{xy \rho \, dV}\).
Ipoint indicates whether this object is to be considered
a point mass. The same algebraic result can be achieved by setting all
moments and products of inertia to zero, but
rollup_mass_props() by default ensures that all leaf items
in the tree have mass properties that correspond to
physically-realizable objects. A zero inertia tensor will fail this
check. Rather than relax the check (which is essential for trustworthy
results), a TRUE value for Ipoint indicates
that the inertia tensor should be excluded from computations.
We construct a graph with edges representing child-parent relations:
library(igraph)
E(test_tree)
#> + 11/11 edges from 7d8200c (vertex names):
#> [1] A.2->A.1 A.3->A.1 C.1->A.1 P.1->A.2 P.2->A.2 P.3->A.2 P.4->A.2 P.5->A.3
#> [9] P.6->A.3 P.7->A.3 P.8->A.3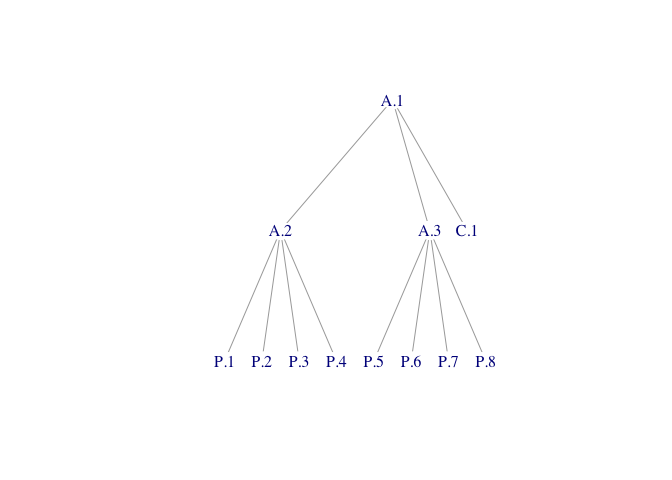
We can roll up mass properties to non-leaf elements as follows:
rollup_mass_props(test_tree, test_table)
#> id parent mass Cx Cy Cz Ixx Ixy Ixz Iyy Iyz Izz POIconv Ipoint
#> 1 A.1 21 0 0 0 144 -4.8 -24.8 144 -23.2 139 - FALSE
#> 2 A.2 A.1 8 1 0 0 32 -0.4 -0.4 24 0.4 24 - FALSE
#> 3 A.3 A.1 8 -1 0 0 32 -0.4 -0.4 24 0.4 24 - FALSE
#> 4 C.1 A.1 5 0 0 0 80 -4.0 -24.0 80 -24.0 75 - FALSE
#> 5 P.1 A.2 2 1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 6 P.2 A.2 2 1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 7 P.3 A.2 2 1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 8 P.4 A.2 2 1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 9 P.5 A.3 2 -1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 10 P.6 A.3 2 -1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 11 P.7 A.3 2 -1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 12 P.8 A.3 2 -1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSENote that, although the table shows the parent of each element for clarity of exposition, the child-parent relations are coneveyed only by the tree passed as the first argument.
The input data may include mass properties uncertainties as well:
test_unc_table
#> id parent mass Cx Cy Cz Ixx Ixy Ixz Iyy Iyz Izz POIconv Ipoint
#> 1 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 2 A.2 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 3 A.3 A.1 NA NA NA NA NA NA NA NA NA NA - FALSE
#> 4 C.1 A.1 5 0 0 0 80 -4.0 -24.0 80 -24.0 75 - FALSE
#> 5 P.1 A.2 2 1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 6 P.2 A.2 2 1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 7 P.3 A.2 2 1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 8 P.4 A.2 2 1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 9 P.5 A.3 2 -1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 10 P.6 A.3 2 -1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 11 P.7 A.3 2 -1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 12 P.8 A.3 2 -1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> sigma_mass sigma_Cx sigma_Cy sigma_Cz sigma_Ixx sigma_Iyy sigma_Izz
#> 1 NA NA NA NA NA NA NA
#> 2 NA NA NA NA NA NA NA
#> 3 NA NA NA NA NA NA NA
#> 4 0.5 0.0 0.0 0.0 8.0 8.0 7.5
#> 5 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 6 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 7 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 8 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 9 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 10 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 11 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> 12 0.2 0.1 0.1 0.1 0.4 0.4 0.4
#> sigma_Ixy sigma_Ixz sigma_Iyz
#> 1 NA NA NA
#> 2 NA NA NA
#> 3 NA NA NA
#> 4 0.40 2.40 2.40
#> 5 0.01 0.01 0.01
#> 6 0.01 0.01 0.01
#> 7 0.01 0.01 0.01
#> 8 0.01 0.01 0.01
#> 9 0.01 0.01 0.01
#> 10 0.01 0.01 0.01
#> 11 0.01 0.01 0.01
#> 12 0.01 0.01 0.01Mass properties and their uncertainties can be rolled up as follows:
rollup_mass_props_and_unc(test_tree, test_unc_table)
#> id parent mass Cx Cy Cz Ixx Ixy Ixz Iyy Iyz Izz POIconv Ipoint
#> 1 A.1 21 0 0 0 144 -4.8 -24.8 144 -23.2 139 - FALSE
#> 2 A.2 A.1 8 1 0 0 32 -0.4 -0.4 24 0.4 24 - FALSE
#> 3 A.3 A.1 8 -1 0 0 32 -0.4 -0.4 24 0.4 24 - FALSE
#> 4 C.1 A.1 5 0 0 0 80 -4.0 -24.0 80 -24.0 75 - FALSE
#> 5 P.1 A.2 2 1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 6 P.2 A.2 2 1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 7 P.3 A.2 2 1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 8 P.4 A.2 2 1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 9 P.5 A.3 2 -1 1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 10 P.6 A.3 2 -1 1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 11 P.7 A.3 2 -1 -1 1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> 12 P.8 A.3 2 -1 -1 -1 4 -0.1 -0.1 4 0.1 4 - FALSE
#> sigma_mass sigma_Cx sigma_Cy sigma_Cz sigma_Ixx sigma_Iyy sigma_Izz
#> 1 0.7549834 0.03809524 0.03809524 0.03809524 8.313844 8.275264 7.792946
#> 2 0.4000000 0.05000000 0.07071068 0.07071068 1.600000 1.200000 1.200000
#> 3 0.4000000 0.05000000 0.07071068 0.07071068 1.600000 1.200000 1.200000
#> 4 0.5000000 0.00000000 0.00000000 0.00000000 8.000000 8.000000 7.500000
#> 5 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 6 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 7 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 8 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 9 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 10 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 11 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> 12 0.2000000 0.10000000 0.10000000 0.10000000 0.400000 0.400000 0.400000
#> sigma_Ixy sigma_Ixz sigma_Iyz
#> 1 1.0586784 2.5924506 2.5924506
#> 2 0.4004997 0.4004997 0.6931089
#> 3 0.4004997 0.4004997 0.6931089
#> 4 0.4000000 2.4000000 2.4000000
#> 5 0.0100000 0.0100000 0.0100000
#> 6 0.0100000 0.0100000 0.0100000
#> 7 0.0100000 0.0100000 0.0100000
#> 8 0.0100000 0.0100000 0.0100000
#> 9 0.0100000 0.0100000 0.0100000
#> 10 0.0100000 0.0100000 0.0100000
#> 11 0.0100000 0.0100000 0.0100000
#> 12 0.0100000 0.0100000 0.0100000These binaries (installable software) and packages are in development.
They may not be fully stable and should be used with caution. We make no claims about them.
Health stats visible at Monitor.