The hardware and bandwidth for this mirror is donated by dogado GmbH, the Webhosting and Full Service-Cloud Provider. Check out our Wordpress Tutorial.
If you wish to report a bug, or if you are interested in having us mirror your free-software or open-source project, please feel free to contact us at mirror[@]dogado.de.
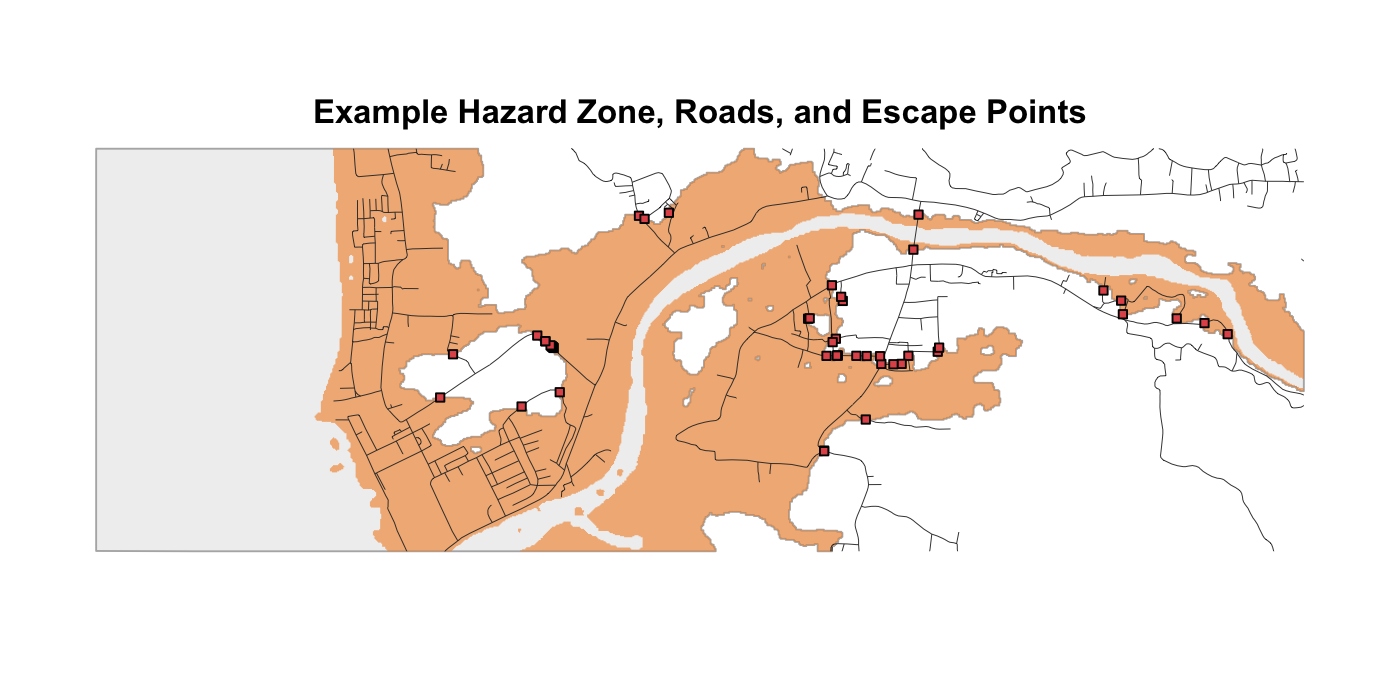
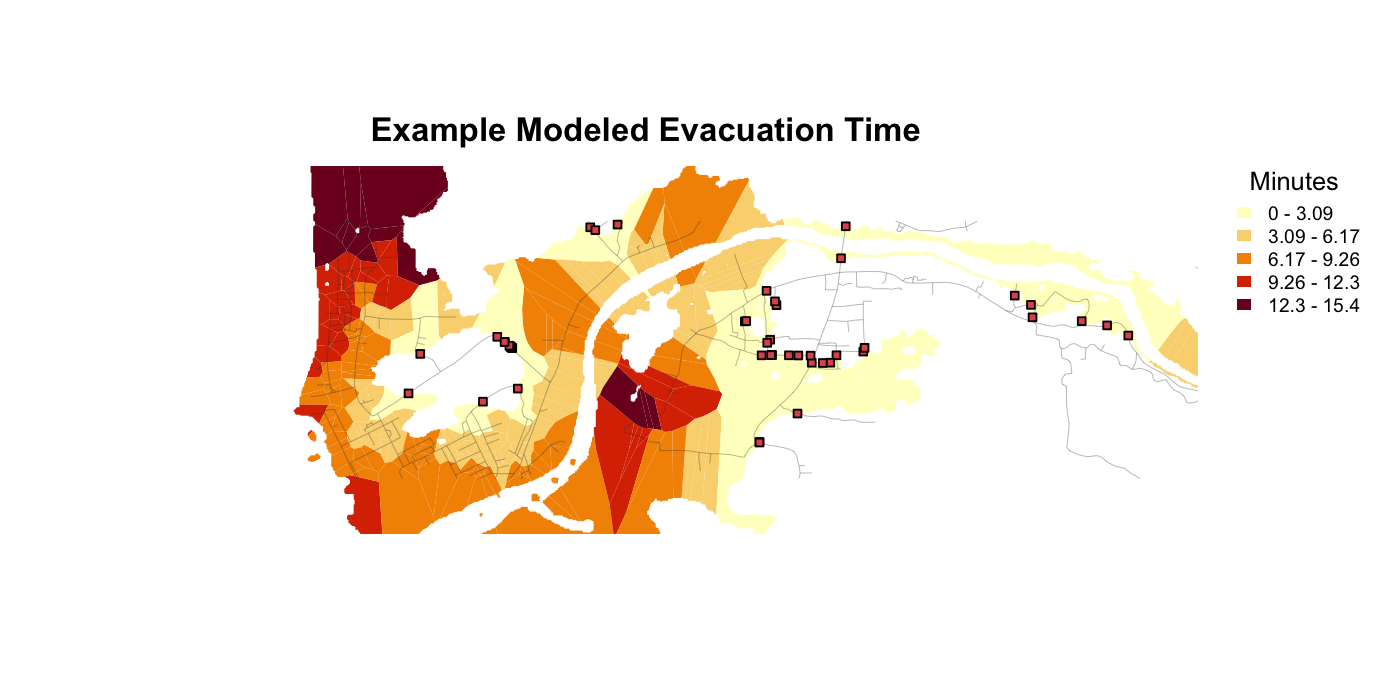
evacpath is an R package for road-constrained pedestrian
evacuation modeling using least-cost path analysis. It takes generic
hazard, road/pathway, and elevation inputs, then returns
distance-to-safety and evacuation-time outputs for any projected study
area.
The package is designed around a simple idea:
hazard zone + roads/pathways + DEM + projected CRS -> distance-to-safety and evacuation-time outputs
The workflow builds on open-source least-cost path methods for
evacuation planning (Cordero et al. 2025) and uses
leastcostpath for least-cost path and movement-potential
modeling (Lewis 2023; Lewis 2021).
This is an initial package scaffold, not a polished CRAN release. It
is ready for local development with devtools::load_all()
and devtools::document().
library(evacpath)
result <- run_evacpath(
hazard_zone = "path/to/hazard_zone.tif",
roads = "path/to/roads.gpkg",
dem = "path/to/dem.tif",
target_crs = "EPSG:XXXX",
region_name = "Study area",
road_buffer_m = 2,
escape_buffer_m = 5,
final_road_buffer_m = 3,
seed = 23401,
walking_speed_mps = 1.22,
clip_mode = "hazard",
progress = TRUE
)
result$evac_polygons
result$distance_points
write_evac_outputs(
result,
output_dir = "outputs",
prefix = "study_area"
)| Function | Purpose |
|---|---|
read_spatial() |
Reads either a file path or an existing terra
object. |
prepare_hazard_zone() |
Converts an inundation raster into a hazard-zone raster or polygon. |
clean_roads() |
Removes roads/pathways based on user-defined attributes. |
prepare_evac_inputs() |
Reads and projects the hazard zone, roads, and DEM. |
make_evac_grid() |
Creates the evacuation grid over the hazard zone. |
find_escape_points() |
Finds candidate exits where roads cross the hazard boundary. |
make_road_mask() |
Buffers roads and escape points to constrain the DEM. |
make_road_origins() |
Creates road-based origin points inside the hazard zone. |
make_conductance_surface() |
Builds the slope-based conductance surface. |
calc_min_distance_to_safety() |
Calculates minimum least-cost distance to safety. |
calc_evac_time() |
Converts distance to evacuation time. |
make_evac_polygons() |
Creates Voronoi evacuation-distance/time polygons. |
run_evacpath() |
Runs the full workflow. |
write_evac_outputs() |
Writes the main outputs to disk. |
Most modeling assumptions are explicit parameters:
run_evacpath(
...,
target_crs = "EPSG:XXXX",
grid_resolution = NULL,
grid_resolution_factor = 5,
road_buffer_m = 2,
escape_buffer_m = 5,
final_road_buffer_m = 3,
dem_resolution = NULL,
walking_speed_mps = 1.22,
clip_mode = "hazard"
)Some coastal workflows need two tsunami zones. The land-only inundation zone is used for origins and mapping. A second zone combines the land inundation footprint with water so that the coastline is not treated as an artificial escape boundary.
library(terra)
library(evacpath)
tsunami <- rast("path/to/inundation.nc")
dem <- rast("path/to/topography.nc")
roads <- vect("path/to/roads.shp")
zones <- prepare_tsunami_zones(
inundation = tsunami,
dem = dem,
target_crs = "EPSG:XXXX",
inundation_threshold = 0,
dem_sign_multiplier = 1
)
roads <- clean_roads(
roads,
exclude = list(field = "road_type", values = "pier"),
target_crs = "EPSG:XXXX"
)
result <- run_evacpath(
hazard_zone = zones$hazard_zone, # land-only TEZ for origins/output
escape_zone = zones$escape_zone, # TEZ + water for true inland escape boundary
roads = roads,
dem = zones$dem,
target_crs = "EPSG:XXXX",
region_name = "Study area"
)Do not use the land-only hazard_zone to find escape
points in tsunami workflows unless you intentionally want the coastline
to act as a boundary. In most tsunami cases, use
escape_zone = zones$escape_zone.
From the parent directory of the package:
install.packages(c("devtools", "terra", "remotes"))
remotes::install_github("josephlewis/leastcostpath") # if leastcostpath is not on CRAN for your setup
devtools::load_all("evacpath")
devtools::document("evacpath")
devtools::check("evacpath")-1;
make that decision per dataset.clean_roads() with region-specific settings.max_origins for exploratory runs and remove or
increase it for final production runs.By default, run_evacpath() now clips
result$evac_polygons / result$time_grid to the
full hazard zone, not just the buffered road network. Movement is still
calculated using the road-constrained conductance surface, but the
mapped time grid is a Voronoi-style surface over the hazard/inundation
zone. Use clip_mode = "road_hazard" only when you want the
older road-buffer-limited output.
Small example inputs are included in inst/extdata/:
inst/extdata/dem.tif
inst/extdata/rds.gpkg
inst/extdata/tsunami_inundation_depth.tifThese files are from the Jakarta example dataset and are used only to demonstrate how to load package data:
dem <- terra::rast(system.file("extdata/dem.tif", package = "evacpath"))
roads <- terra::vect(system.file("extdata/rds.gpkg", package = "evacpath"))
inundation <- terra::rast(system.file("extdata/tsunami_inundation_depth.tif", package = "evacpath"))The detailed diagnostic example is available at
vignettes/diagnostic-example.Rmd and
inst/examples/diagnostic-example.Rmd. It walks through each
major function separately, including tsunami-specific zone preparation,
inset cropping of roads used for escape-point detection, road-aware
escape-boundary generation, least-cost-path testing, and final time-grid
mapping.
The README figures are generated with terra plotting
code in inst/scripts/make-readme-figures.R. The figures use
a focused projected window (x = 669000 to
675000, y = 9223000 to 9225000)
so the examples stay readable.
For tsunami workflows, the preferred escape-point pattern is:
zones <- prepare_tsunami_zones(inundation, dem, target_crs = target_crs)
roads_for_escape <- crop_roads_to_inner_extent(
roads = roads,
zone = zones$escape_zone,
inset_x_m = 250,
inset_y_m = 250
)
escape_boundary_zone <- make_road_aware_escape_zone(
escape_zone = zones$escape_zone,
roads = roads_for_escape,
road_buffer_m = 2,
crop_buffer_m = 3
)
escape_points <- find_escape_points(
hazard_zone = escape_boundary_zone,
roads = roads_for_escape
)Use ?evacpath after running
devtools::document() or installing the package to view the
package-level help page.
Cordero, E., Ruiz Vélez, R., Huérfano Moreno, V., Sherman, C., 2025. Enhancing tsunami evacuation strategies in Puerto Rico using open-source least-cost path analysis. J. Disaster Sci. Manag. 1, 18. https://doi.org/10.1007/s44367-025-00018-y
Lewis, J., 2023. leastcostpath: Modelling Pathways and Movement Potential Within a Landscape.
Lewis, J., 2021. Probabilistic Modelling for Incorporating Uncertainty in Least Cost Path Results: a Postdictive Roman Road Case Study. Journal of Archaeological Method and Theory 28, 911-924. https://doi.org/10.1007/s10816-021-09522-w
These binaries (installable software) and packages are in development.
They may not be fully stable and should be used with caution. We make no claims about them.
Health stats visible at Monitor.