The hardware and bandwidth for this mirror is donated by dogado GmbH, the Webhosting and Full Service-Cloud Provider. Check out our Wordpress Tutorial.
If you wish to report a bug, or if you are interested in having us mirror your free-software or open-source project, please feel free to contact us at mirror[@]dogado.de.
weightedVoronoi generates weighted spatial partitions that respect boundaries, landscape structure, and heterogeneous point influence using Euclidean or geodesic distance.
🌐 Website: https://HarriRaven.github.io/weightedVoronoi/
Weighted Euclidean and geodesic tessellations inside arbitrary polygon domains
Flexible weight semantics via weight_model and weight_power
Custom resistance surfaces and barriers via
compose_resistance() and
add_barriers()
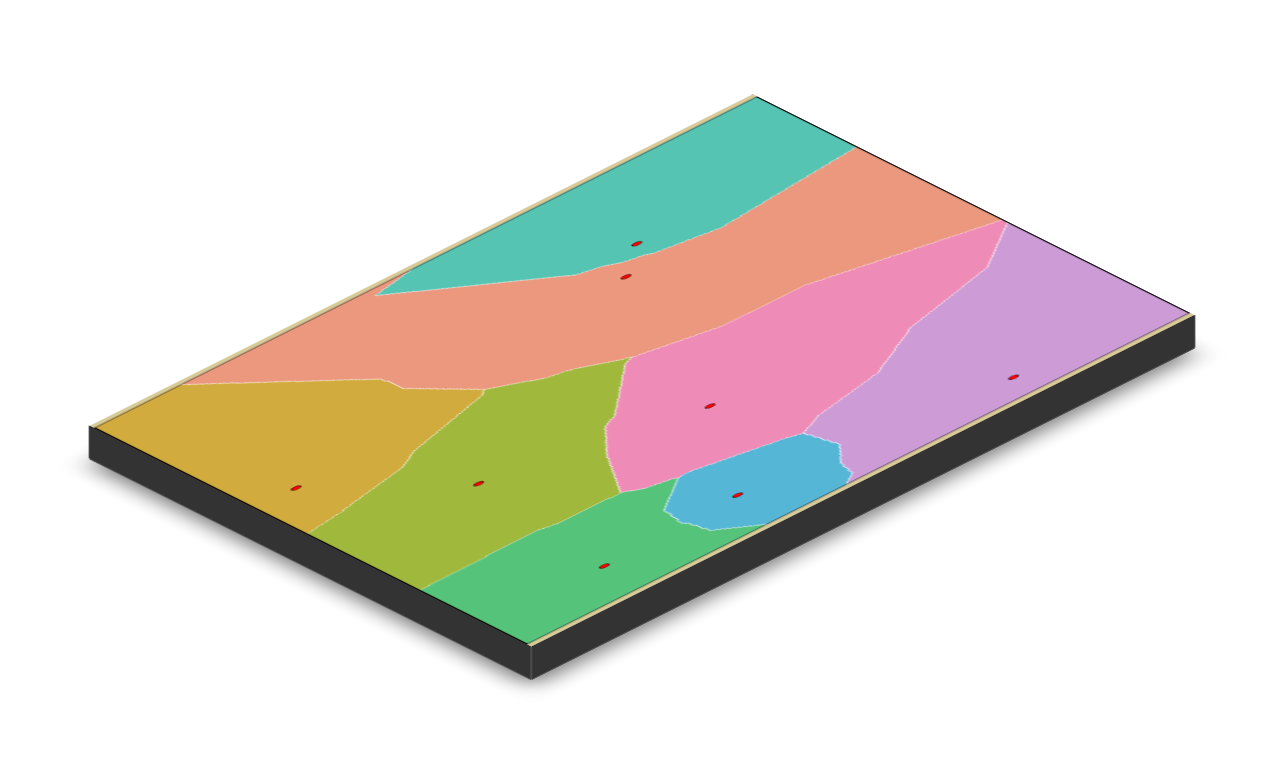
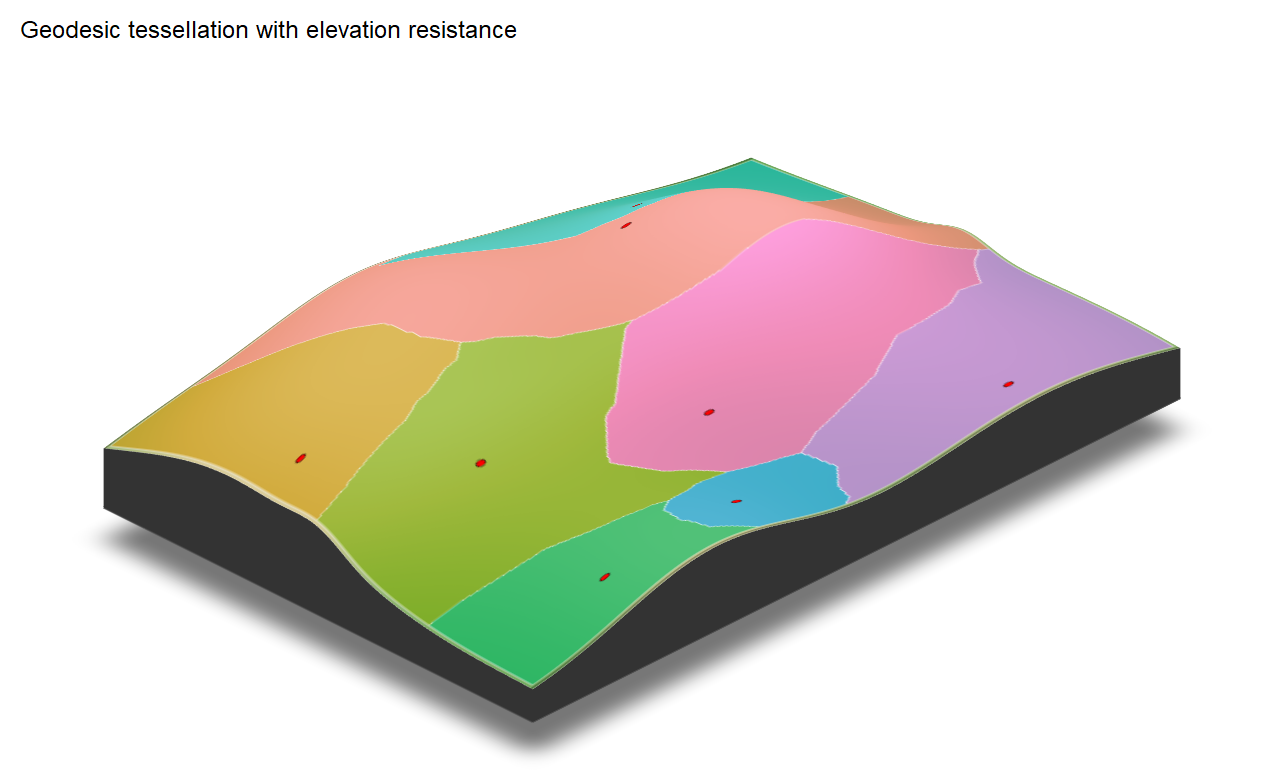
Terrain-informed geodesic allocation via DEM/Tobler resistance
Terrain-anisotropic geodesic tessellations
Scalable multisource geodesic allocation for additive isotropic geodesics
Uncertainty-aware tessellations with probability and entropy outputs
Temporal tessellation stacks with change and persistence maps
Explore weighted Voronoi tessellations interactively:
👉 https://harriraven.shinyapps.io/weightedVoronoi-demo/
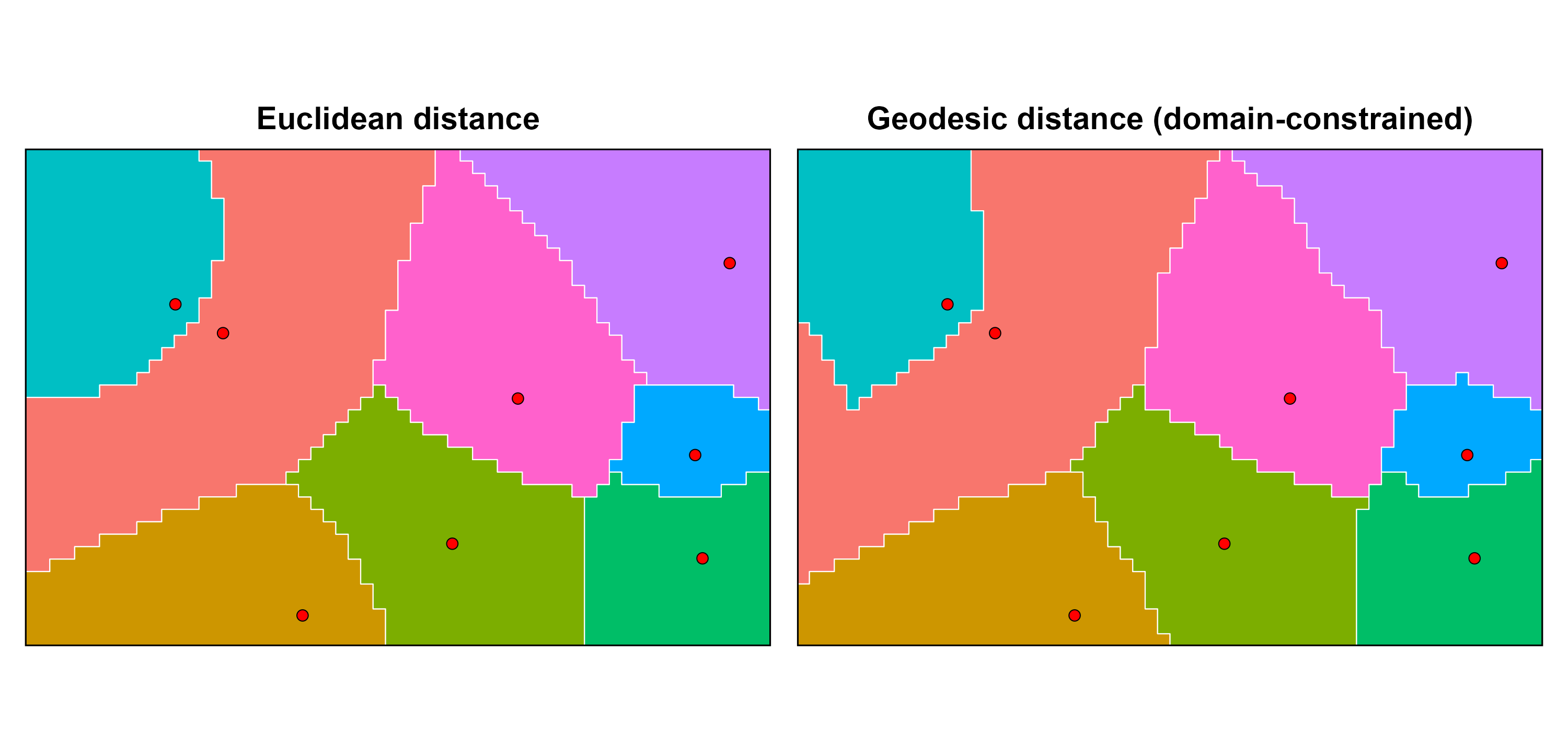
weightedVoronoi supports several spatial tessellation approaches depending on your assumptions about distance, landscape structure, and analysis goals.
Straight-line influence (fastest) →
distance = "euclidean"
Constrained by domain geometry (no crossing gaps/barriers) →
distance = "geodesic"
Landscape affects movement (e.g. terrain, land cover) → provide
resistance_rast or dem_rast
Uphill vs downhill matters (directional movement) →
anisotropy = "terrain"
Repeated runs (uncertainty or time series) → use
prepare_geodesic_context() + geodesic_engine = "multisource"
Uncertain weights → weighted_voronoi_uncertainty()
Time series of tessellations →
weighted_voronoi_time()
For a more detailed guide, see the vignette.
install.packages("remotes")
remotes::install_github("HarriRaven/weightedVoronoi")
library(sf)
library(terra)
library(weightedVoronoi)crs_use \<- 32636boundary_sf <- st_sf(
geometry = st_sfc(
st_polygon(list(rbind(
c(0, 0),
c(1000, 0),
c(1000, 1000),
c(0, 1000),
c(0, 0)
)))
),
crs = crs_use
)points_sf <- st_sf(
village = paste0("V", 1:5),
population = c(50, 200, 1000, 150, 400),
geometry = st_sfc(
st_point(c(200, 200)),
st_point(c(800, 250)),
st_point(c(500, 500)),
st_point(c(250, 800)),
st_point(c(750, 750))
),
crs = crs_use
)out_euc <- weighted_voronoi_domain(
points_sf = points_sf,
weight_col = "population",
boundary_sf = boundary_sf,
res = 20,
weight_transform = log10,
distance = "euclidean",
# optional: alternative weight behaviour
weight_model = "multiplicative",
verbose = FALSE
)out_geo <- weighted_voronoi_domain(
points_sf = points_sf,
weight_col = "population",
boundary_sf = boundary_sf,
res = 20,
weight_transform = log10,
distance = "geodesic",
close_mask = TRUE,
close_iters = 1,
verbose = FALSE
)The package also supports uncertainty-aware and temporal workflows; see the vignette for worked examples.
ctx <- prepare_geodesic_context(...)
weighted_voronoi_domain(..., prepared = ctx)Fast reuse currently supported in:
weighted_voronoi_domain(..., prepared = ctx)Temporal and uncertainty workflows automatically reuse internal preparation and do not currently accept external prepared contexts
ctx <- prepare_geodesic_context(
boundary_sf = boundary_sf,
res = 20,
geodesic_engine = "multisource"
)
# Now reuse for many runs (fast)
out1 <- weighted_voronoi_geodesic(
points_sf = points_t1,
weight_col = "population",
prepared = ctx
)
out2 <- weighted_voronoi_geodesic(
points_sf = points_t2,
weight_col = "population",
prepared = ctx
)This avoids rebuilding the geodesic graph and can substantially speed up repeated runs (e.g. temporal or uncertainty workflows).
Build a resistance surface on the same grid, optionally combine layers, then apply barriers before running a geodesic tessellation.
# Use the Euclidean allocation grid as a convenient template
template <- out_euc$allocation
# Base resistance (all 1)
R <- template
terra::values(R) <- 1
# Add a high-friction vertical band (e.g., dense vegetation)
xy <- terra::xyFromCell(R, 1:terra::ncell(R))
band <- xy[,1] > 450 & xy[,1] < 550
vals <- terra::values(R)
vals[band] <- 25
terra::values(R) <- vals
# Add a semi-permeable river barrier (vector line)
river <- st_sf(
geometry = st_sfc(st_linestring(rbind(c(500, 0), c(500, 1000)))),
crs = st_crs(boundary_sf)
)
# Tip: for coarse rasters, use width ~ res/2 or res
R2 <- add_barriers(R, river, permeability = "semi", cost_multiplier = 20, width = 20)
out_geo_res <- weighted_voronoi_domain(
points_sf = points_sf,
weight_col = "population",
boundary_sf = boundary_sf,
res = 20,
weight_transform = log10,
distance = "geodesic",
resistance_rast = R2,
verbose = FALSE
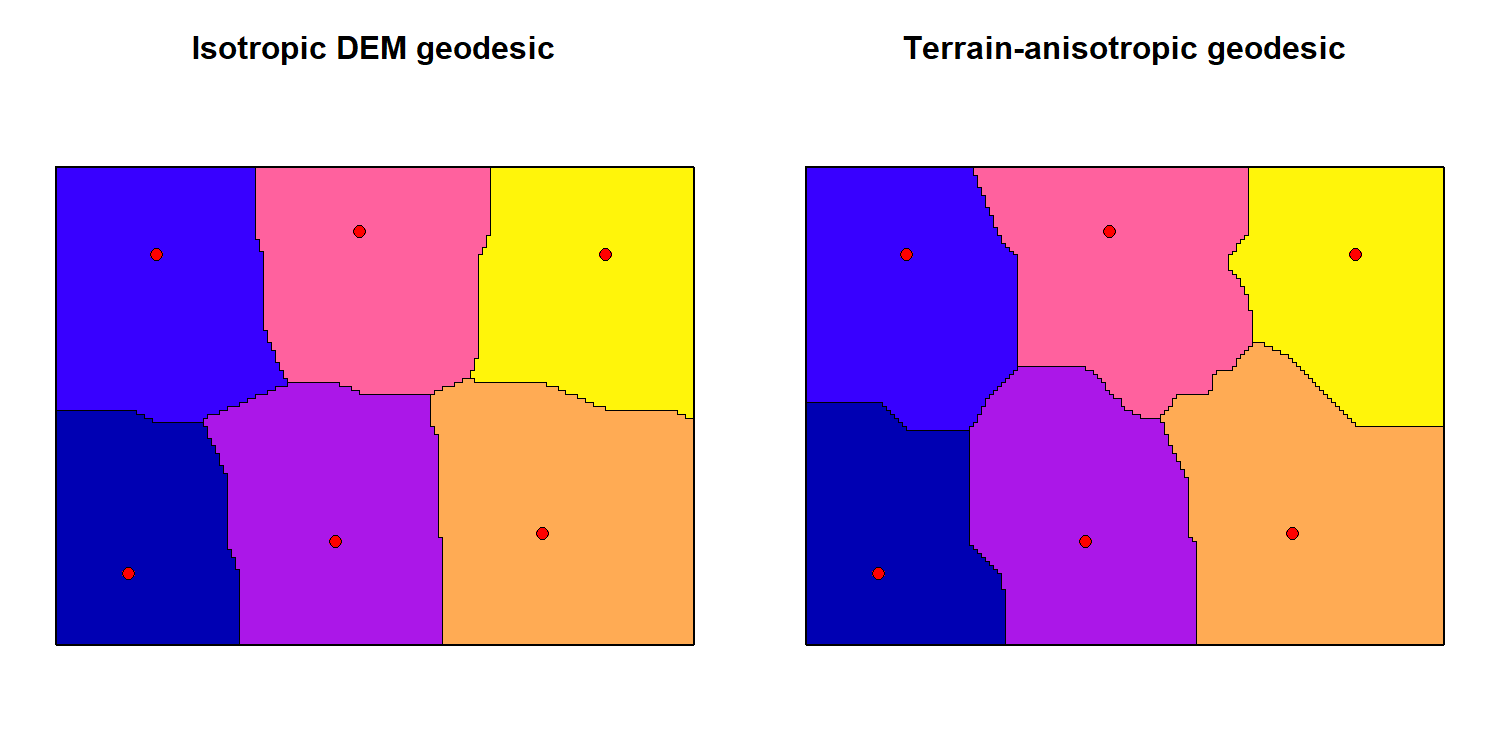
)Environmental resistance and terrain can strongly influence spatial allocation.
The example below shows how terrain anisotropy (direction-dependent movement cost) can substantially alter geodesic tessellations compared to isotropic resistance.
Unlike isotropic resistance, terrain-anisotropic geodesic tessellations allow uphill and downhill movement to differ, producing direction-dependent allocation patterns.
names(out_euc)
head(out_euc$summary)
out_euc$diagnosticsweighted_voronoi_domain() returns:
polygons: sf object with one polygon per generator (and attributes)
allocation: terra::SpatRaster assigning each raster cell to a generator
summary: generator-level summary table (area, share, weights, etc.)
diagnostics: diagnostics and settings (coverage, unreachable fraction for geodesic, etc.)
Inputs must be in a projected CRS with metric units (e.g. metres).
res controls the raster resolution and therefore the trade-off between speed and boundary fidelity.
Geodesic tessellations are typically slower than Euclidean tessellations because shortest-path distances are computed within the domain.
If you use weightedVoronoi, please cite the associated software note:
bibentry(
bibtype = "Manual",
title = "weightedVoronoi: Weighted Spatial Tessellations Using Euclidean and Geodesic Distances",
author = person("Harri", "Ravenscroft"),
year = "2026",
note = "R package version 1.1.1",
url = "https://github.com/HarriRaven/weightedVoronoi"
)![]()
These binaries (installable software) and packages are in development.
They may not be fully stable and should be used with caution. We make no claims about them.
Health stats visible at Monitor.